
Robotics Safety Architecture. Ready for 2028!
Open safety architecture for the next generation of robotics
New requirements under ISO 10218:2025, increasing complexity in HRC (human-robot collaboration) applications, and proprietary safety solutions present new challenges for machine builders, robotics OEMs, and integrators. Today, safety must be considered early on in architectural decisions—because later adjustments result in high engineering costs, long integration times, and limited scalability.

To address precisely these challenges, Kendrion combines its SIL3/PLe safety controller with a safety library that includes kinematic functions for robot applications. The open safety architecture enables vendor-neutral integration into EtherCAT- and FSoE-based robotics systems and reduces dependence on proprietary robot platforms.
With an integrated safety library for motion, force, and spatial zone monitoring, a minimum cycle time of 2 ms, and support for up to 9 axes, Kendrion lays the foundation for flexible, scalable, and standards-compliant robotic safety concepts up to SIL 3 / PLe.
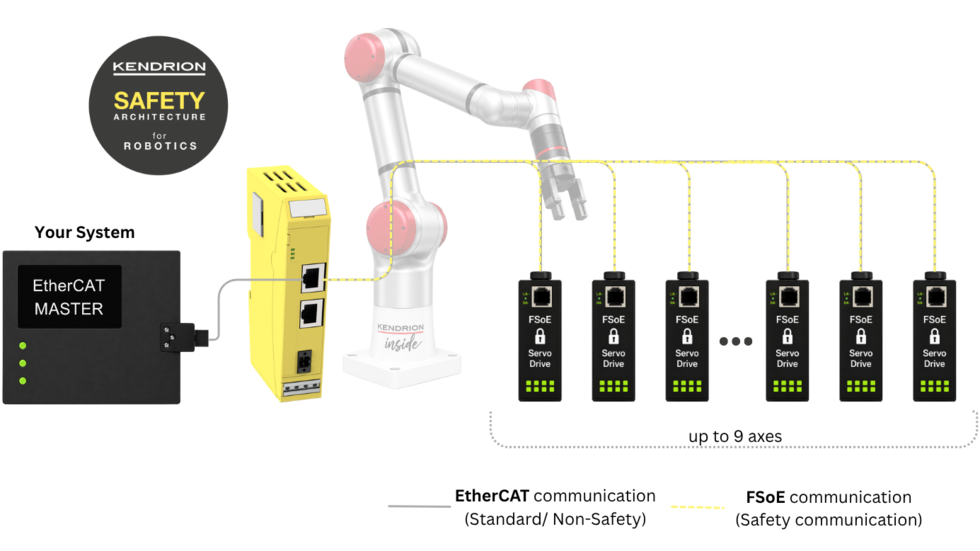
The Kendrion safety architecture enables the seamless integration of modern robotic safety functions into existing EtherCAT and FSoE networks. The EtherCAT master communicates directly with the safe FSoE servo drives via the Kendrion safety PLC, providing end-to-end safety communication for robots with up to 9 axes.
The Safety PLC handles the kinematic safety monitoring of the entire robot movement and processes safety-relevant data from all integrated axes and drives in real time with a minimal cycle time of 2 ms. Movements, speeds, forces, as well as spatial and distance zones are continuously monitored—regardless of the robot system or drive manufacturer used.
Thanks to the open and scalable architecture, existing automation, motion control, and servo drive concepts can be flexibly reused and efficiently expanded with modern safety functions — without the need for proprietary robotic controllers.
Cobots – Fast, Safe, and without Enclosures
In practice, the use of cobots often fails due to safety requirements: Either the speed is significantly reduced to comply with permissible force limits, or the cobot is spatially enclosed—just like a traditional industrial robot. Both approaches hinder efficient human-robot collaboration.
Kendrion offers a powerful alternative here. With scalable safety controllers and application-specific safety libraries, cobots can be dynamically controlled—for maximum productivity while maintaining the highest level of safety. This ensures that collaboration between humans and machines remains fast, flexible, and compliant with standards.
Even with traditional industrial robots — for example, during the teach-in or service phase — stricter safety requirements can be reliably met. Solutions designed to meet the requirements effective from 2028 will be available shortly.
Get ready for 2028 with the Kendrion Safety Architecture for robot kinematics!
The new ISO 10218:2025 standard expands the safety approach from the traditional protection of individual robot movements to a holistic view of the entire robot application. Dynamic safety zones, context-dependent safety responses, and advanced functions for human-robot collaboration and safe force monitoring are becoming the new standard.
Our Kendrion Safety PLC with an integrated safety library supports this shift with powerful safety functions at the application level. Advanced safe space monitoring, adaptive safety logic, and model-based, safe force and power limiting enable flexible, efficient, and simultaneously standards-compliant automation solutions. In this way, we lay the foundation for safe, intelligent, and future-proof robotics applications.
Top-level safety functions in accordance with the latest requirements
| ISO 10218:2011 | ISO 10218:2025 | Coverage provided by Kendrion Safety Architecture for Robotics | |
|---|---|---|---|
| Safety focus | Focus on robot and TCP/tool path | Entire robot application considered safety-relevant | ✔ Advanced application-level safety functions |
| Protection zones | Mainly static safety zones | Dynamic and adaptive protection zones | ✔ Advanced safe zone monitoring |
| Safety response | Mostly fixed safety responses | Context-dependent safety responses | ✔ Adaptive safety logic |
| Collaboration | Basic collaboration functions | Advanced PFL and SSM safety functions | ✔ Safe collaboration functions |
| Force monitoring | Limited requirements for safe force evaluation | Validated safe force and power limitation | ✔ Safe force monitoring |
| Zone monitoring | Simple safe areas | Advanced safe space and distance zones | ✔ Safe space and distance zone monitoring |
Complex Real-Time Kinematic Calculations
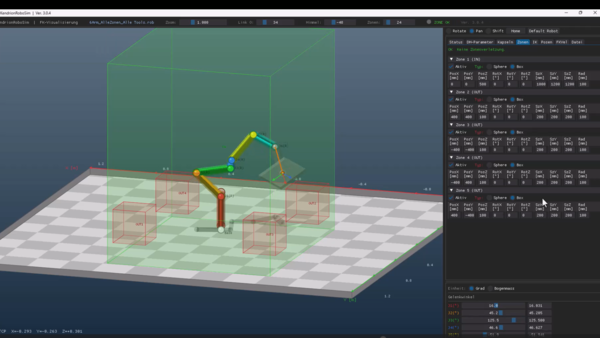
The Kendrion Safety Architecture for robotics combines high-performance kinematic calculations with precise real-time processing for modern robotic systems. Even complex robot kinematics with up to 9 axes, up to 20 safety zones, and dynamic safety functions are processed reliably and deterministically.
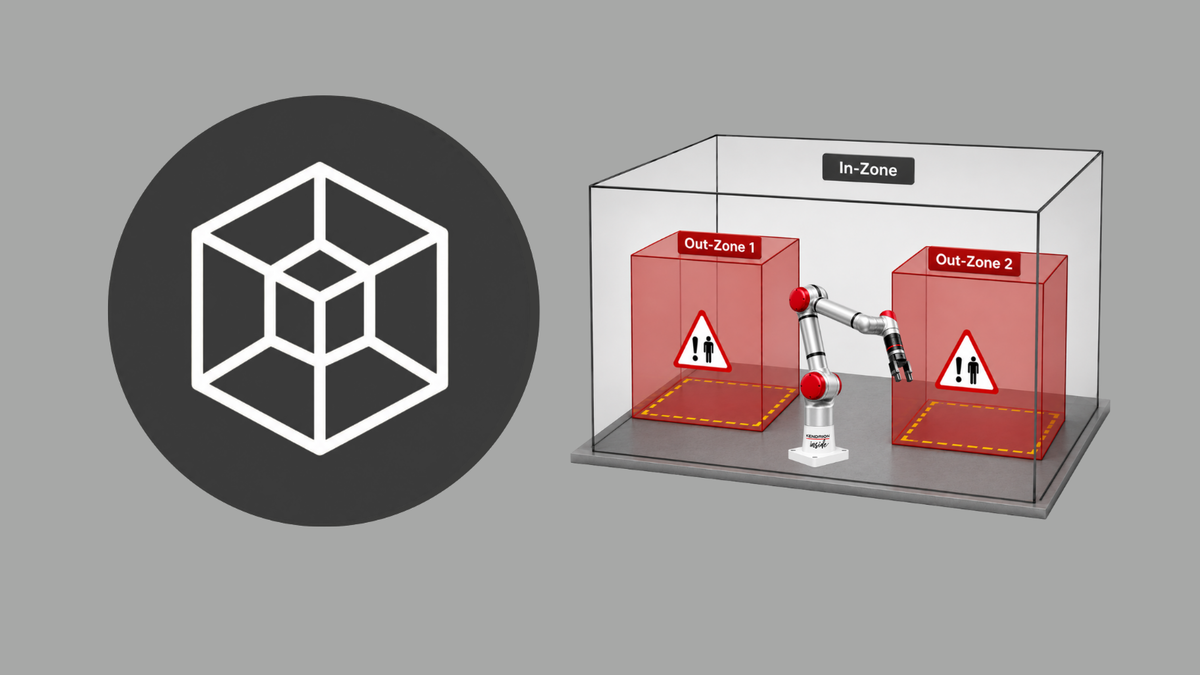
The scalable safety architecture enables ultra-fast calculations of movements, speeds, positions, and external forces at the link level. At the same time, flexible 3D safety zones as well as in- and out-of-zone areas are continuously monitored in real time.
Thanks to its powerful computational architecture, the Kendrion solution is ideally suited for demanding robotics applications with high requirements for dynamics, precision, and functional safety.

What does ISO 10218:2025 mean regarding the safety of industrial robots?
What does ISO 10218:2025 mean regarding the safety of industrial robots?
With the update to ISO 10218:2025, the safety of the entire robotic application is now a top priority. In addition to axis movements and the Tool Center Point (TCP), the updated standard also addresses the tool, the workpiece, motion, speed, force, torque, safety zones, and human-robot interaction.
This means that robot safety must be considered as early as the architectural planning phase for robot manufacturers, machine builders, and system integrators.
Anyone developing new robot platforms or robot cells in the coming years should begin addressing the requirements of ISO 10218:2025 and the new EU Machinery Directive today.
What is the Kendrion safety architecture for robotics?
What is the Kendrion safety architecture for robotics?
The Kendrion safety architecture for robotics is an open safety architecture designed for modern robot kinematics. The combination of a SIL 3 / PLe safety PLC with a robotics safety library for safety-related functions represents a significant advancement in this field.
The solution monitors robot movements, speeds, forces, torques, and safety zones in real time. Kendrion thus supports robot manufacturers, machine builders, and system integrators in establishing a scalable safety architecture for EtherCAT- and FSoE-based robotics systems.
What are the technical requirements for Kendrion Robotics Safety?
What are the technical requirements for Kendrion Robotics Safety?
The Kendrion safety architecture is a solution specifically developed for use in robotic systems with an EtherCAT master and safe FSoE drives. FSoE stands for “Fail Safe over EtherCAT” and enables safe communication within an EtherCAT-based automation system.
For kinematic safety monitoring, relevant robot data is also required, such as axis information, kinematic model, position limits, speed limits, force and torque limits, as well as safety zone requirements.
What is the difference between the Motion, Force, and Zone safety control levels?
What is the difference between the Motion, Force, and Zone safety control levels?
Motion represents the basic level for safe motion monitoring. It monitors positions, speeds, and position and speed limits. Motion is particularly well-suited for traditional industrial robotics applications where reliable position and speed monitoring is a top priority.
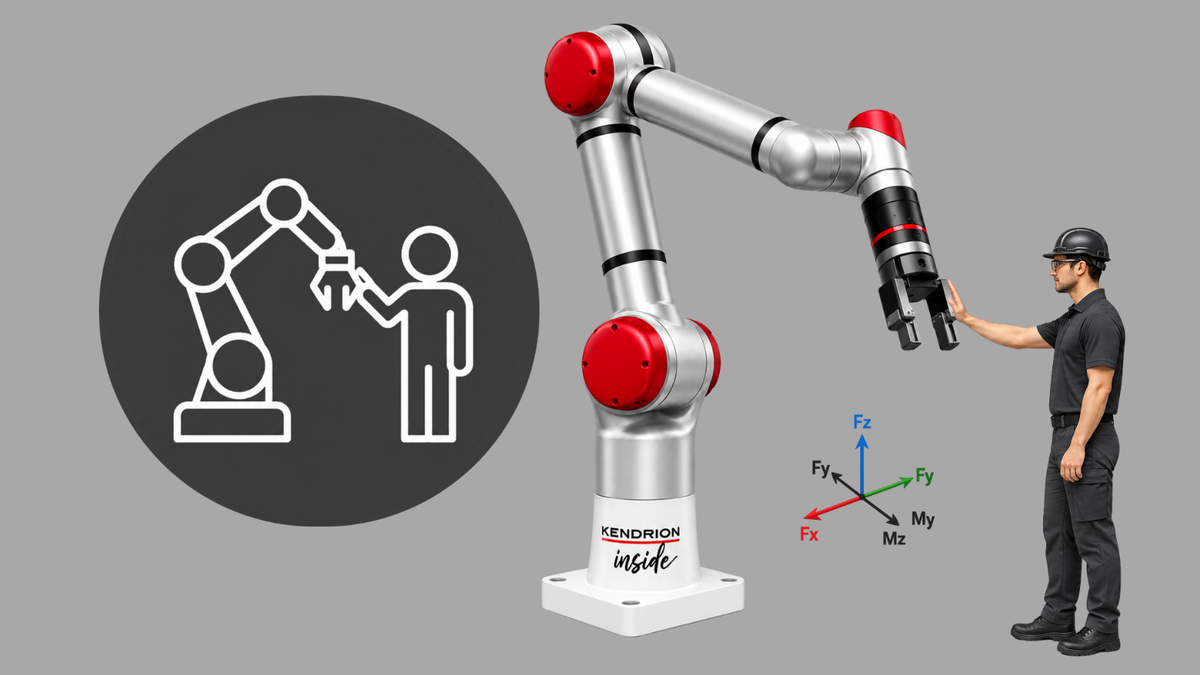
Force supplements Motion with force and torque monitoring functions. This level is particularly relevant for cobots and human-robot collaboration, where movements and interactions must be safely evaluated.
Zone extends the architecture with flexible 3D zone monitoring. This allows for the monitoring of configurable safety zones, link geometries, and TCP areas. Zone is particularly suitable for complex robot cells, HRC applications, and dynamic workspaces.
Why is an open robotics safety architecture an advantage?
Why is an open robotics safety architecture an advantage?
An open robotics safety architecture reduces dependence on proprietary robot controllers and manufacturer-specific safety solutions. This is particularly relevant for companies that wish to cover different robot platforms, drive systems, or machine variants with a unified safety architecture.
Kendrion facilitates seamless integration with existing EtherCAT- and FSoE-based automation systems. This allows existing control and drive concepts to continue to be used, reduces engineering effort, and enables future robotics platforms to be scaled more flexibly.
