Safety first - with the emergency solenoid arrestor from Kendrion
In modern production and intralogistics environments, flexible, automated solutions are the key to efficiency and competitiveness. Automated guided vehicles (AGVs) and collaborative robots (cobots) are becoming increasingly important – they transport loads autonomously and automate assembly processes, often in direct interaction with humans.
For such transport handling robots that operate in close contact with humans, reliant arrestor systems are needed that stop the movement immediately in an emergency and guarantee a high degree of fail-safety.
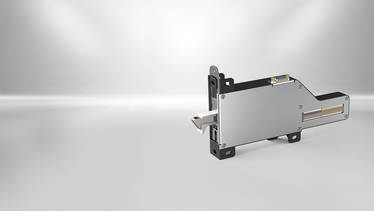
The Kendrion emergency solenoid arrestor is a combination of a specially designed linear solenoid and e.g. a gear wheel or a star wheel, which is mounted by the customer. In the energised state, the pin of the magnetic solenoid arrestor is retracted. In the event of an emergency, the robotic joint locking is switched off and falls into the gear wheel, thus stopping the movement. The solenoid arrestor system guarantees a high level of safety in an emergency and when the system is at a standstill. The travel distance until the application stops is mainly determined by the distance between the points of entry in the rotating counterpart. For low current consumption in the open state, the retracted position is reached once using overexcitation. Afterwards, the position is maintained with a lower holding voltage to save energy.
Emergency solenoid arrestor and safety I/O solution from a single source
In addition to the emergency solenoid arrestor, Kendrion offers a CODESYS controller with integrated safety functionalities (FSoE) for use in automated guided vehicles, for example. The safety I/O solution from Kendrion impresses with a compact system that can be used to safely record all digital and analogue signals.